



|
|

Проект 2
Вариант 1 В этом проекте робомобиль будет двигаться вперед и при встрече с препятствием остановится. Затем сделает задний ход с одновременным разворотом и пойдет уже по другой прямой. Теперь для робомобиля можно устроить импровизированный лабиринт из которого он должен самостоятельно выбраться на свободу. Робомобиль располовинен на две части, что и позволяет ему делать разворот. Ведущим лучше сделать только одно колесо. В состав проекта включен датчик расстояния.

Первый кубик устанавливает скорость вращения двигателя. Второй устанавливает направление его вращения. Третий остановит робомобиль при встрече с препятствием. Четвертый меняет направление вращения двигателя на противоположное. Пятый задает движение назад с разворотом в одну секунду. Команды которые заключены в желтую дугу повторятся. Таким образом циклы будут повторяться до тех пор пока ты не остановишь работу этой программы. Как видишь программа очень маленькая. Самостоятельно дополни ее звуками, сообщениями и картинками на экране. Попробуй построить программу в результате работы которой робомобиль будет двигаться задним ходом несколько кругов.
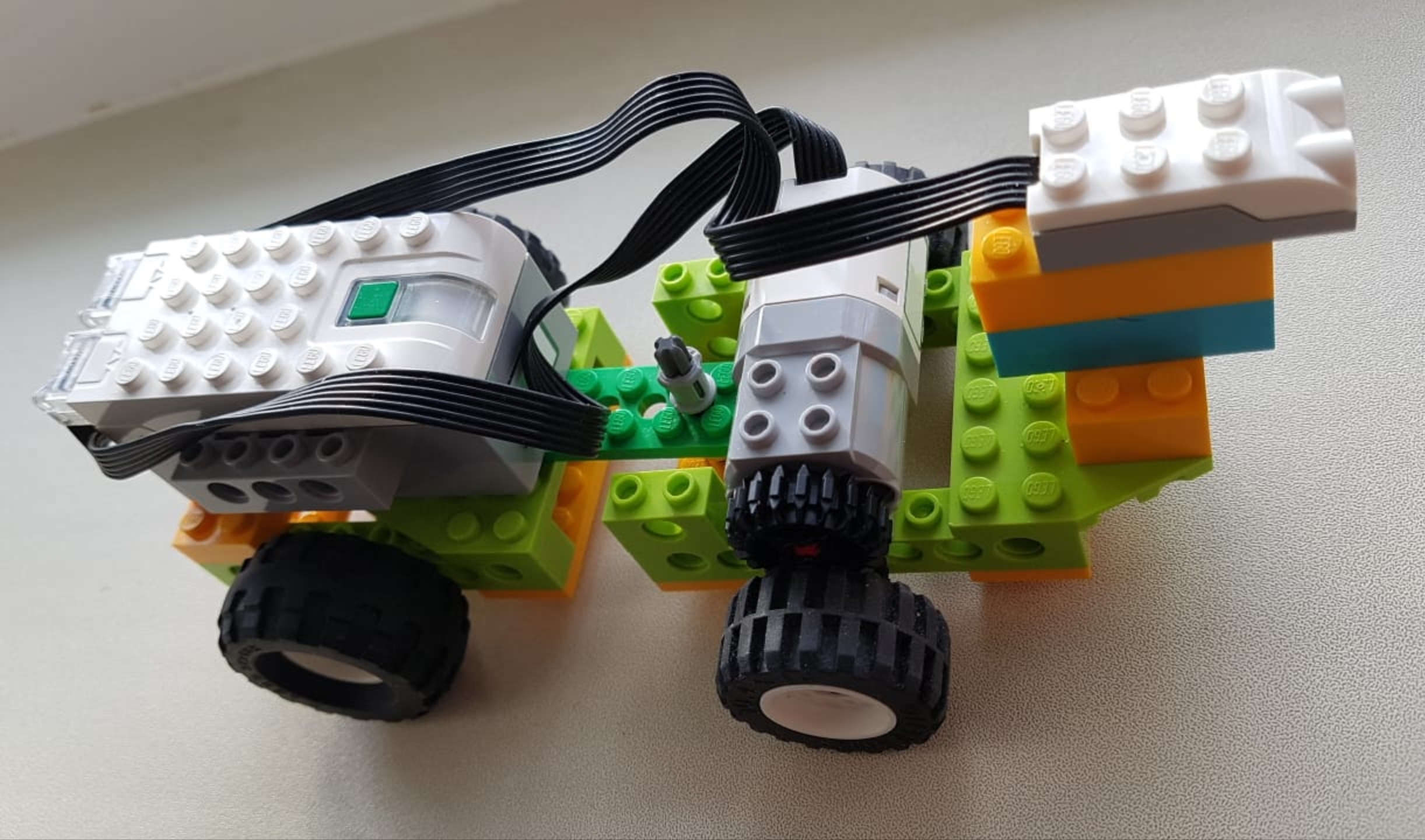
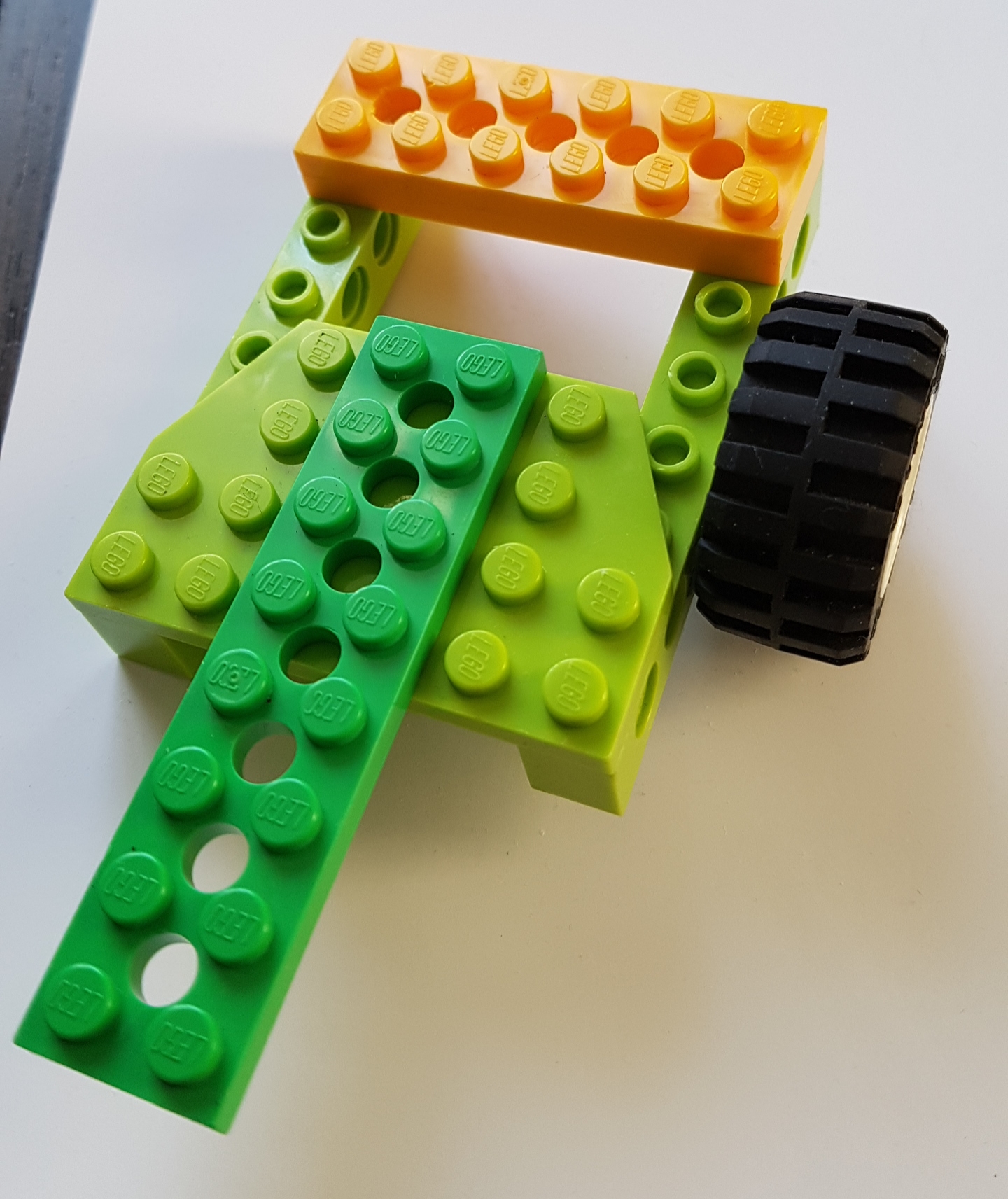
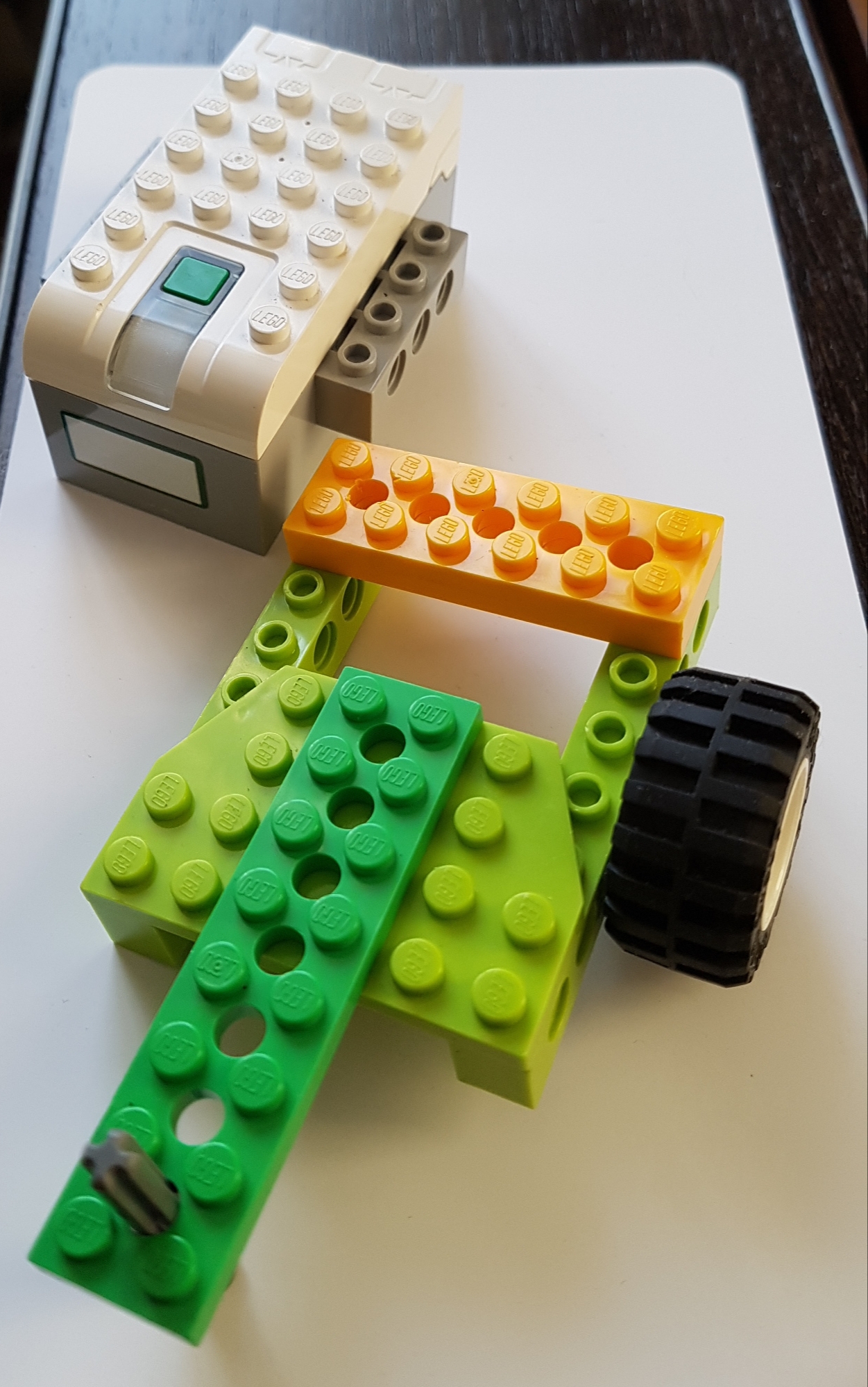
 Вариант 2 Предлагаю другой вариант этого устройства.
Вариант 2 Предлагаю другой вариант этого устройства.
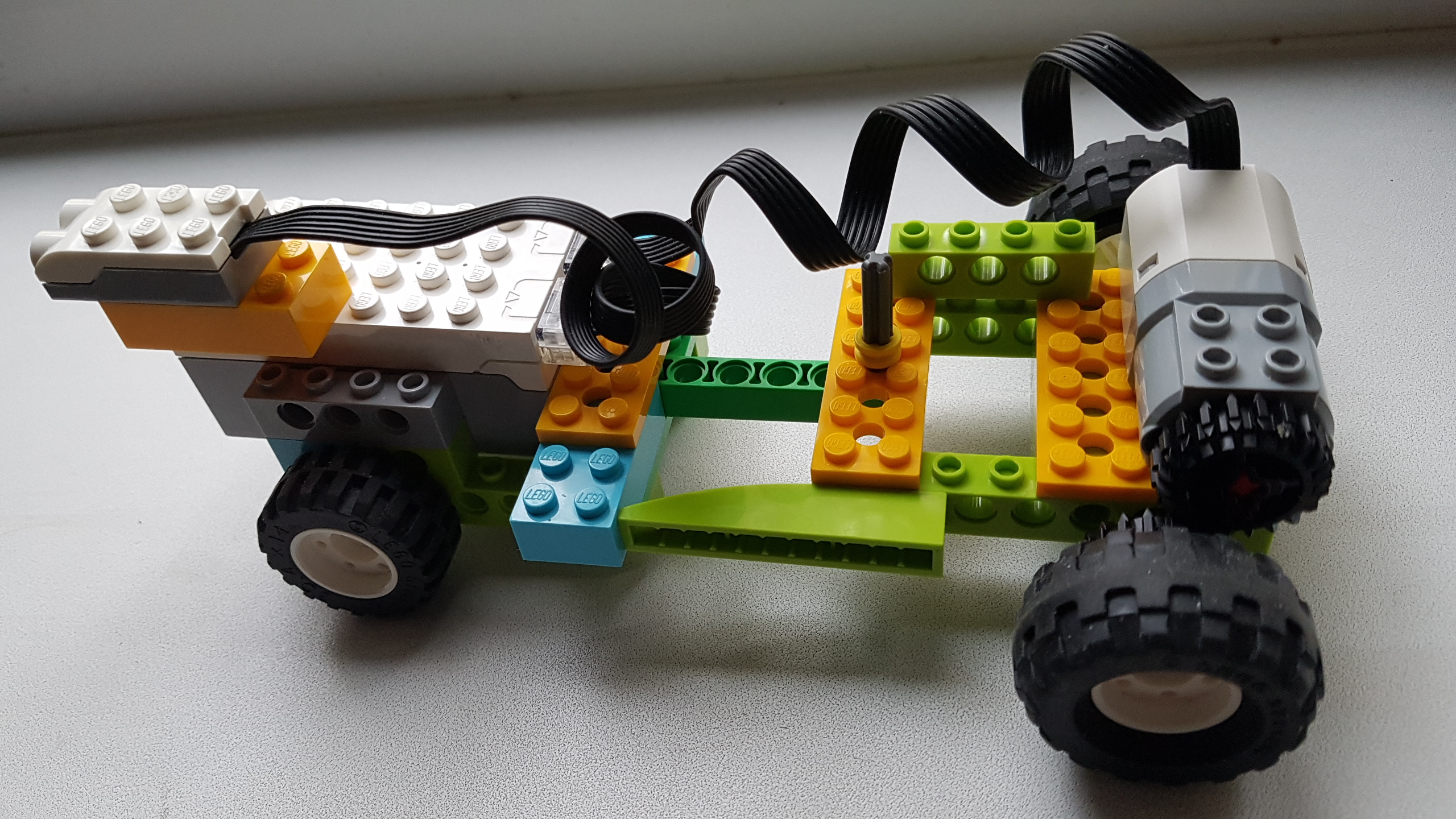
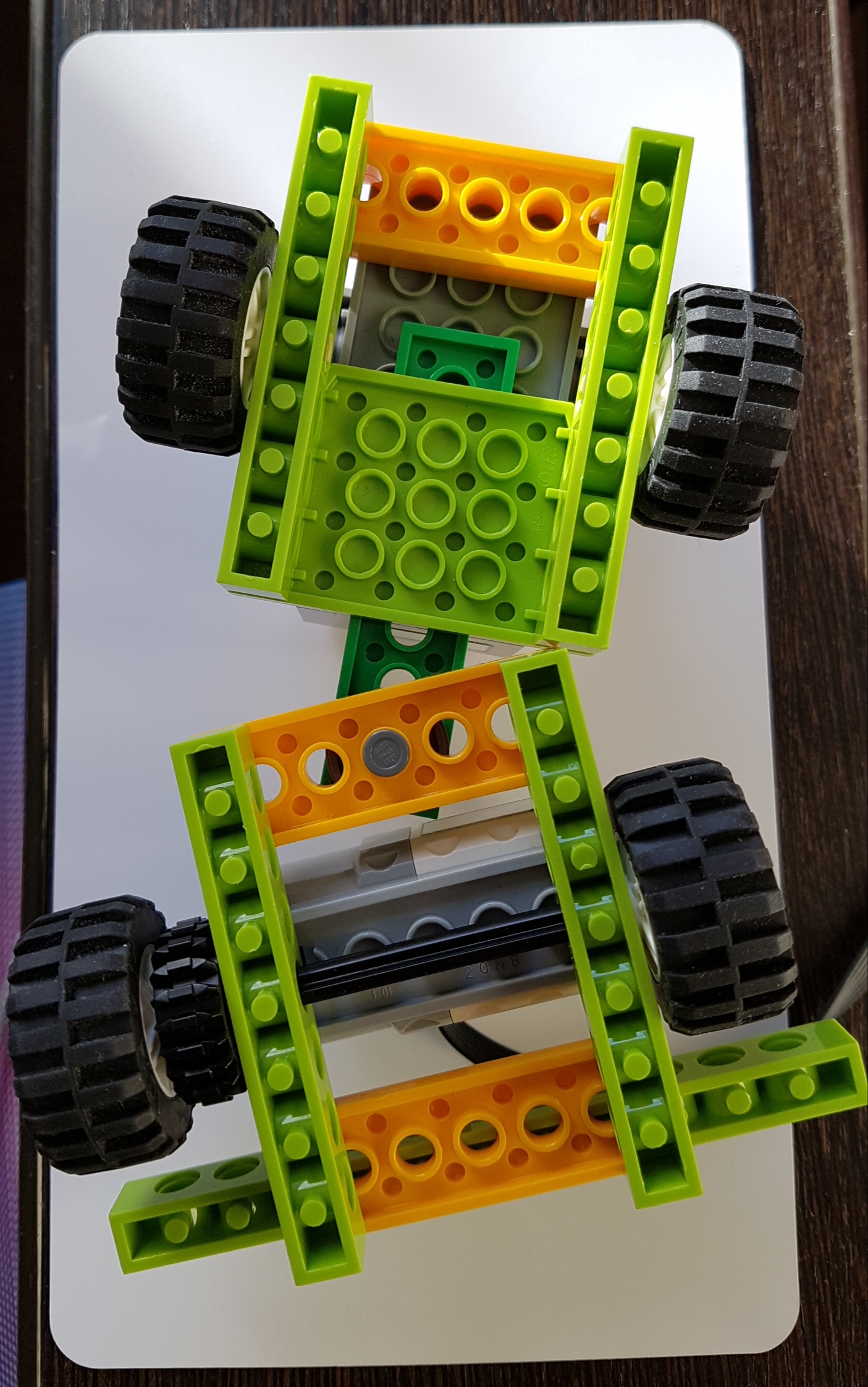
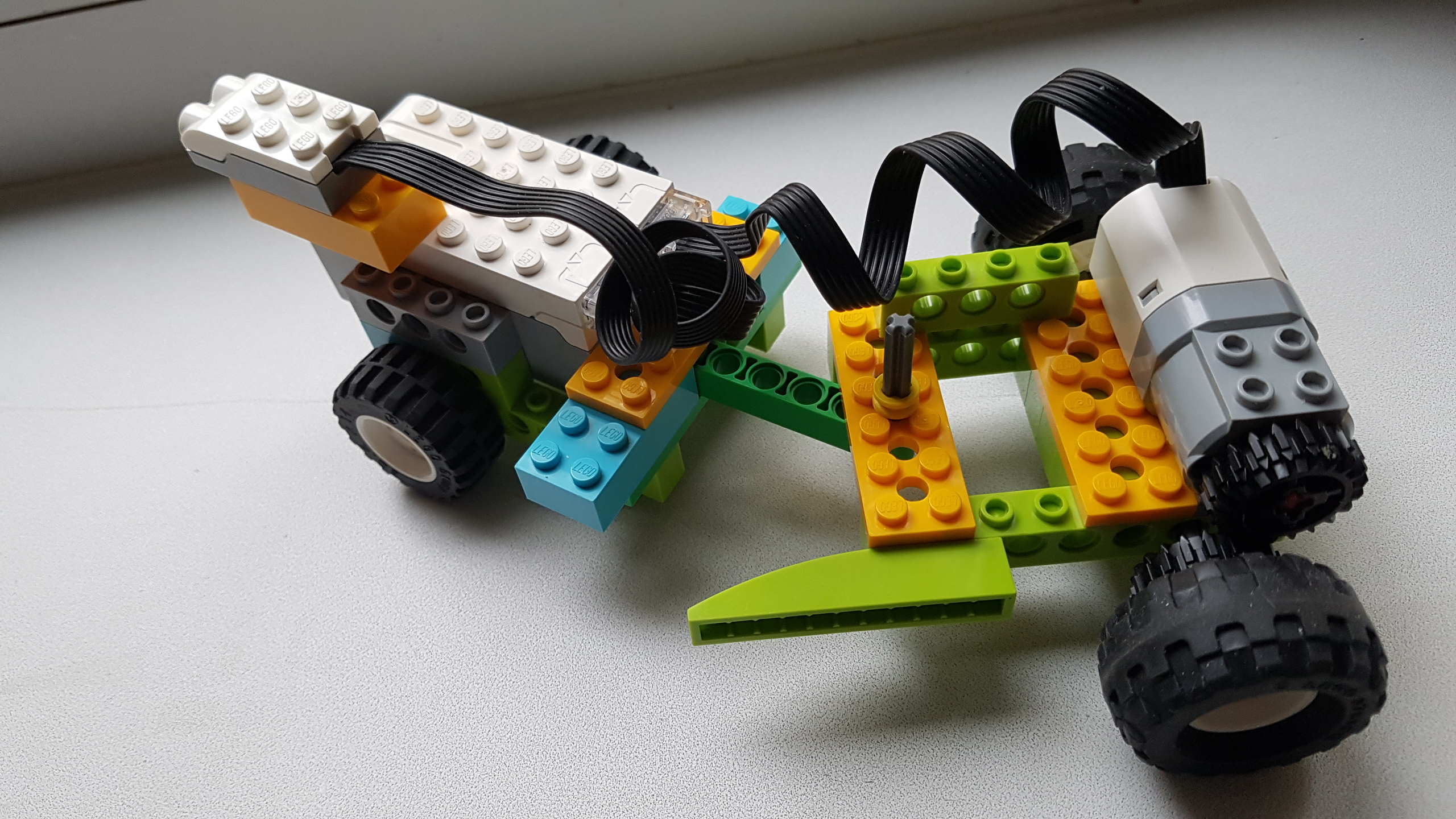
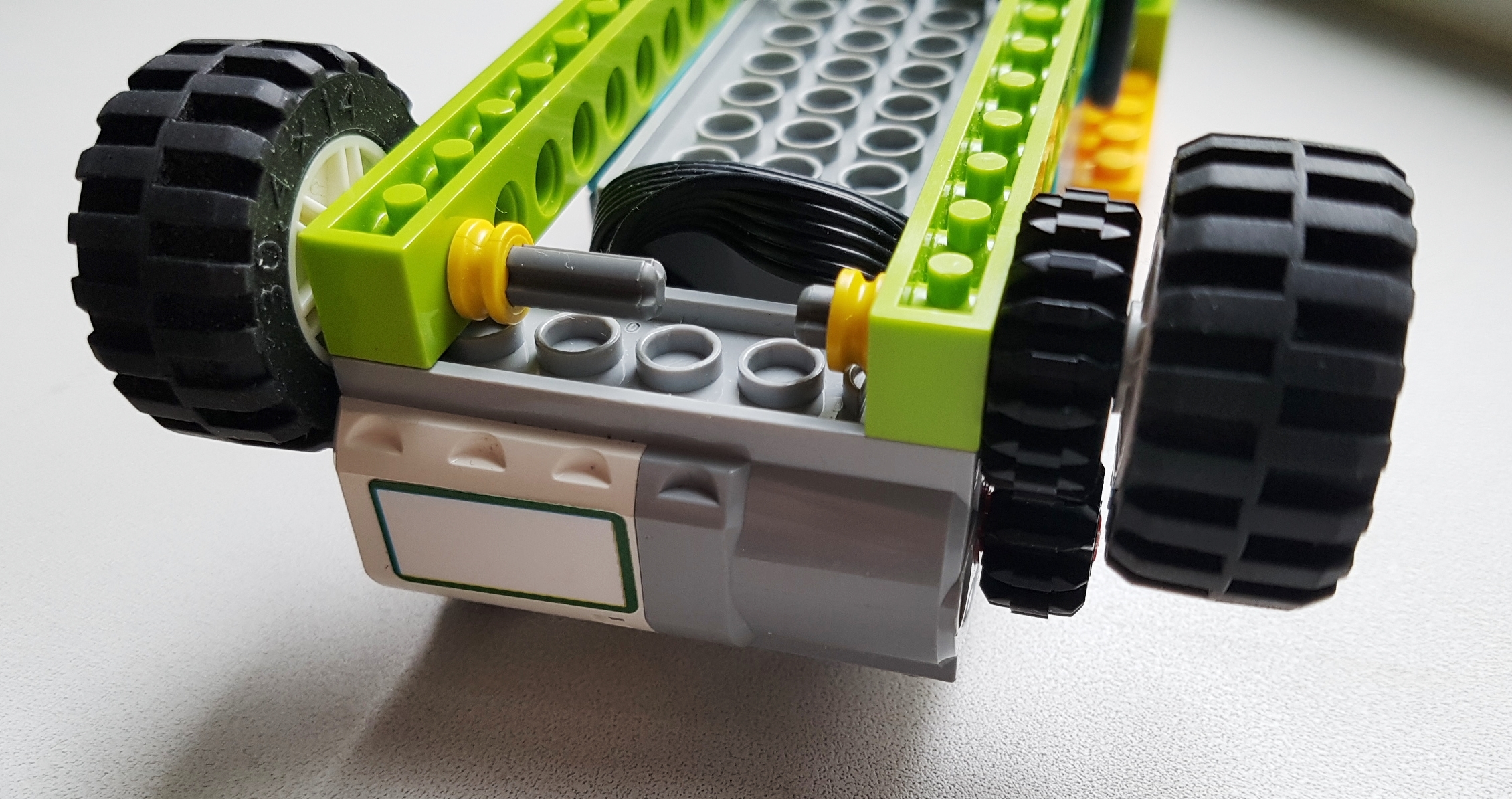
Вариант 3 Этот проект взял из сети. На первой картинке показано движение вперед. На второй движение назад с разворотом. Как видите двигатель установлен на задней платформе. Ведущим должно обязательно быть заднее левое колесо.
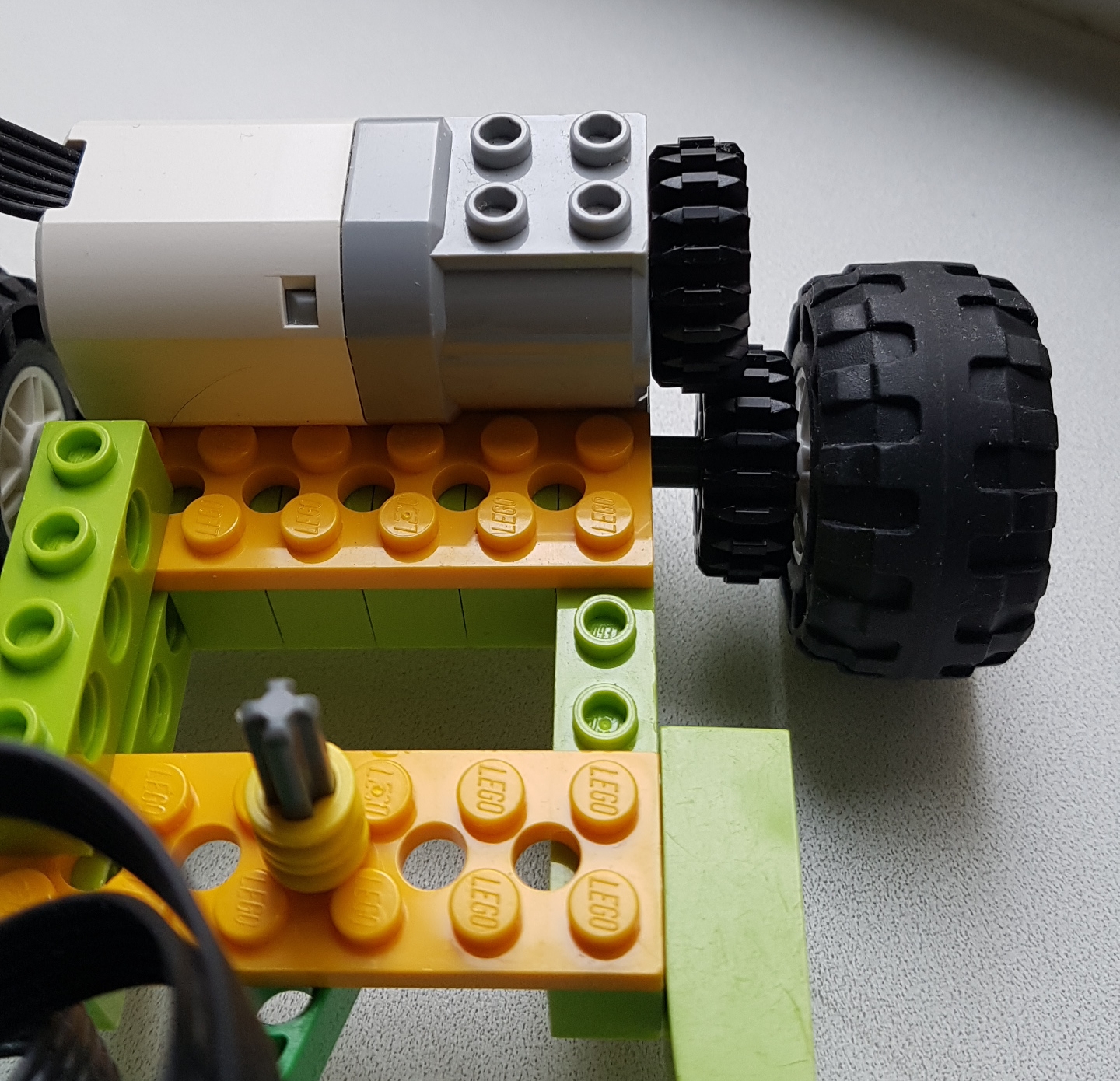
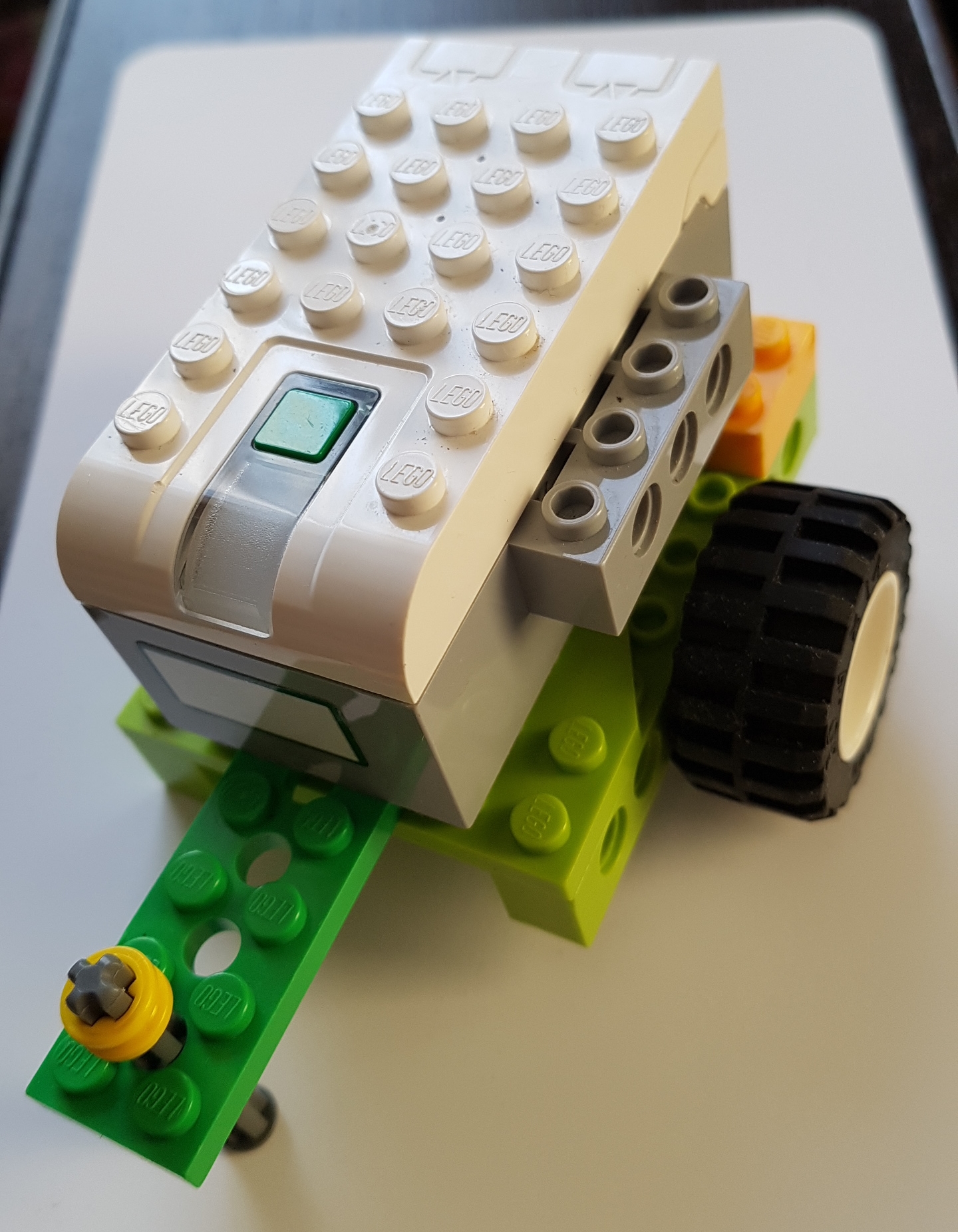
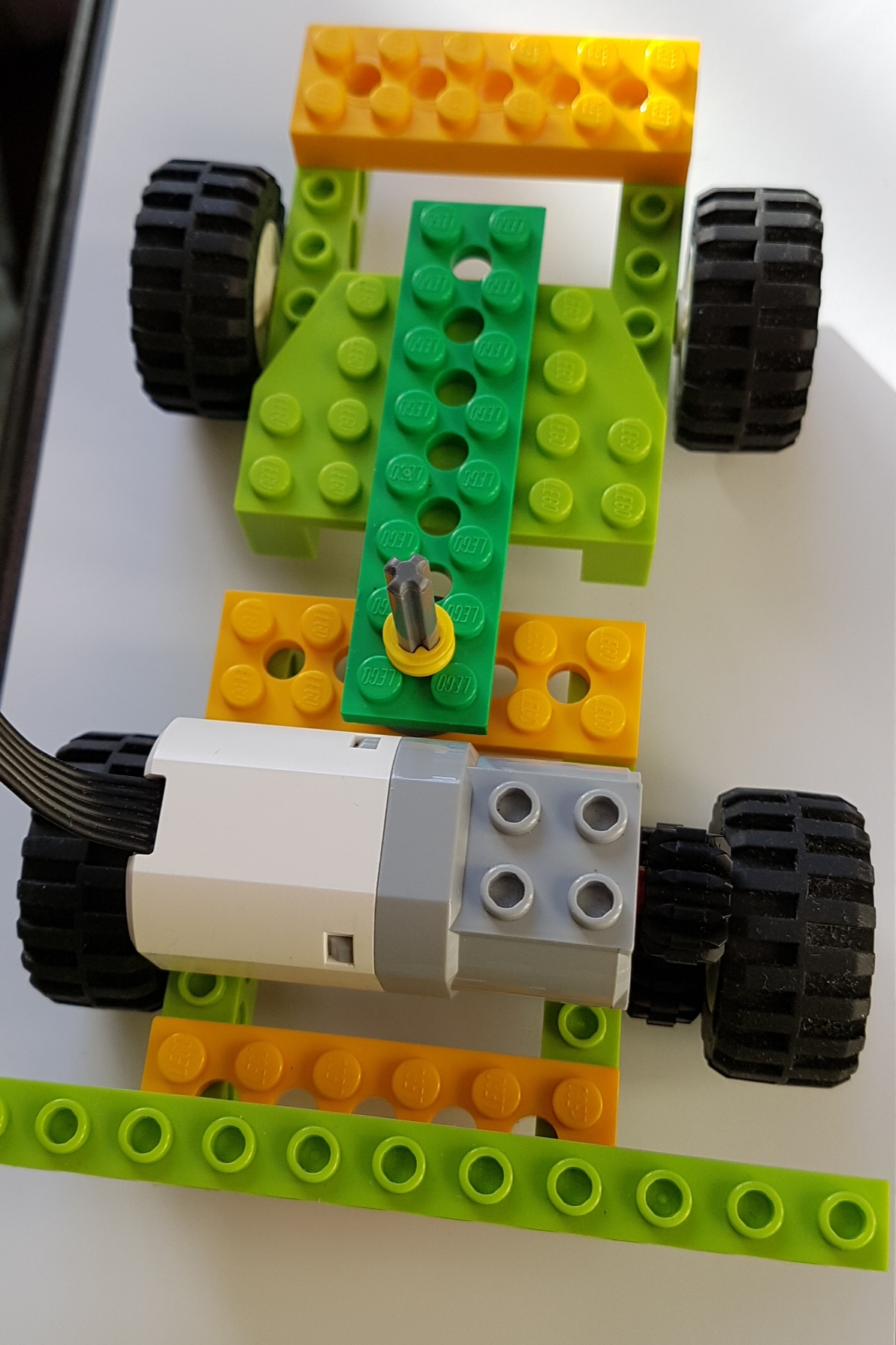
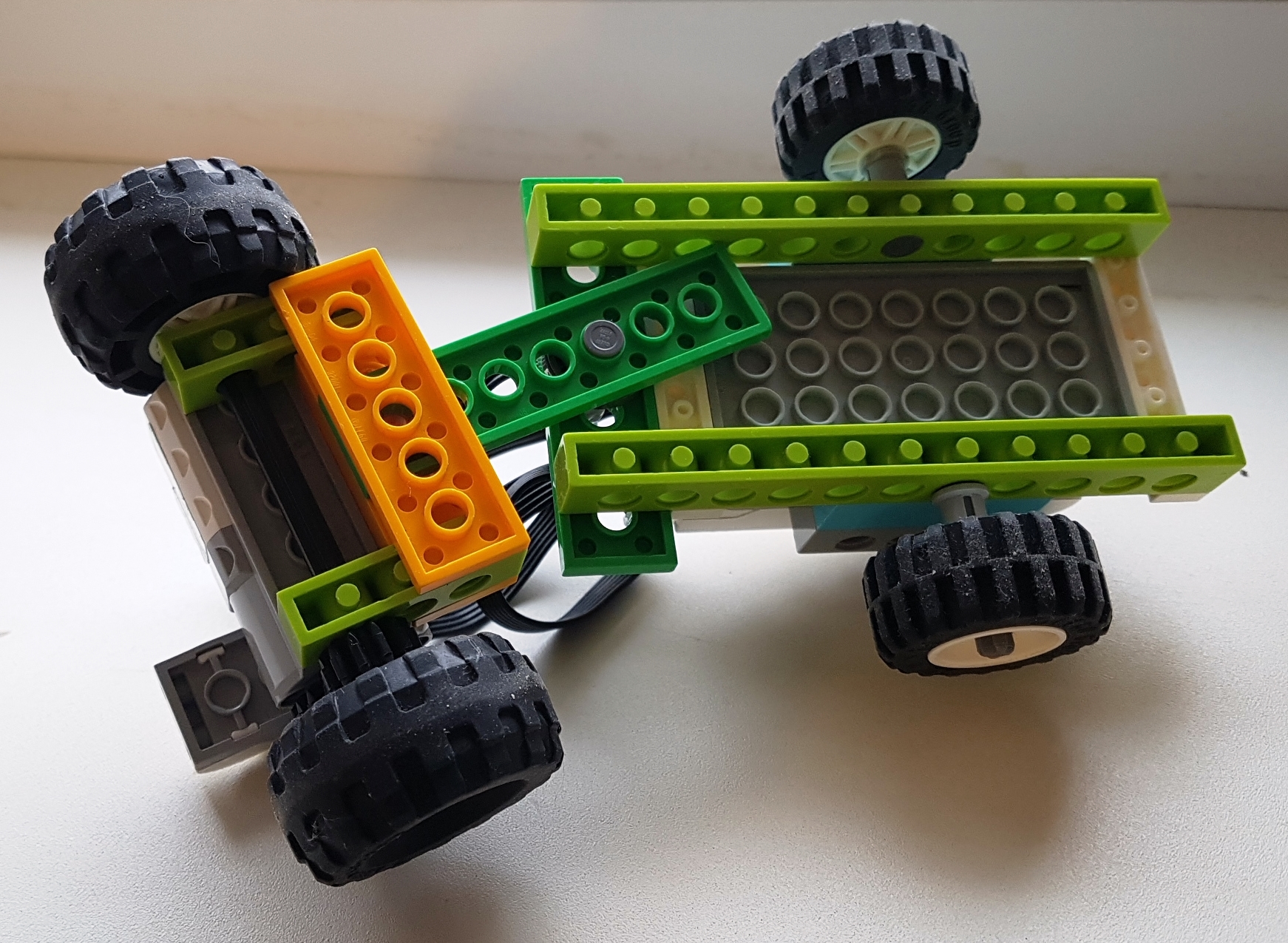
Механическое сопряжение шестерней в данной модели осуществляется внахлест. У каждой шестерни рабочей является боковая дорожка.
 Для увеличения линейной скорости робомобиля надо увеличивать диаметр шестерни на валу электродвигателя. На этой картинке видим механическую передачу состоящую из двух шестерней. Обе они являются трехполосными. Для связи между ними задействованы только их центральные дорожки. Боковые дорожки здесь не работают. Ведущим является одно колесо, что является непременным условием для модели данного проекта.
Для увеличения линейной скорости робомобиля надо увеличивать диаметр шестерни на валу электродвигателя. На этой картинке видим механическую передачу состоящую из двух шестерней. Обе они являются трехполосными. Для связи между ними задействованы только их центральные дорожки. Боковые дорожки здесь не работают. Ведущим является одно колесо, что является непременным условием для модели данного проекта.
![]()
|
|
|
|