



|
|

Проект 1
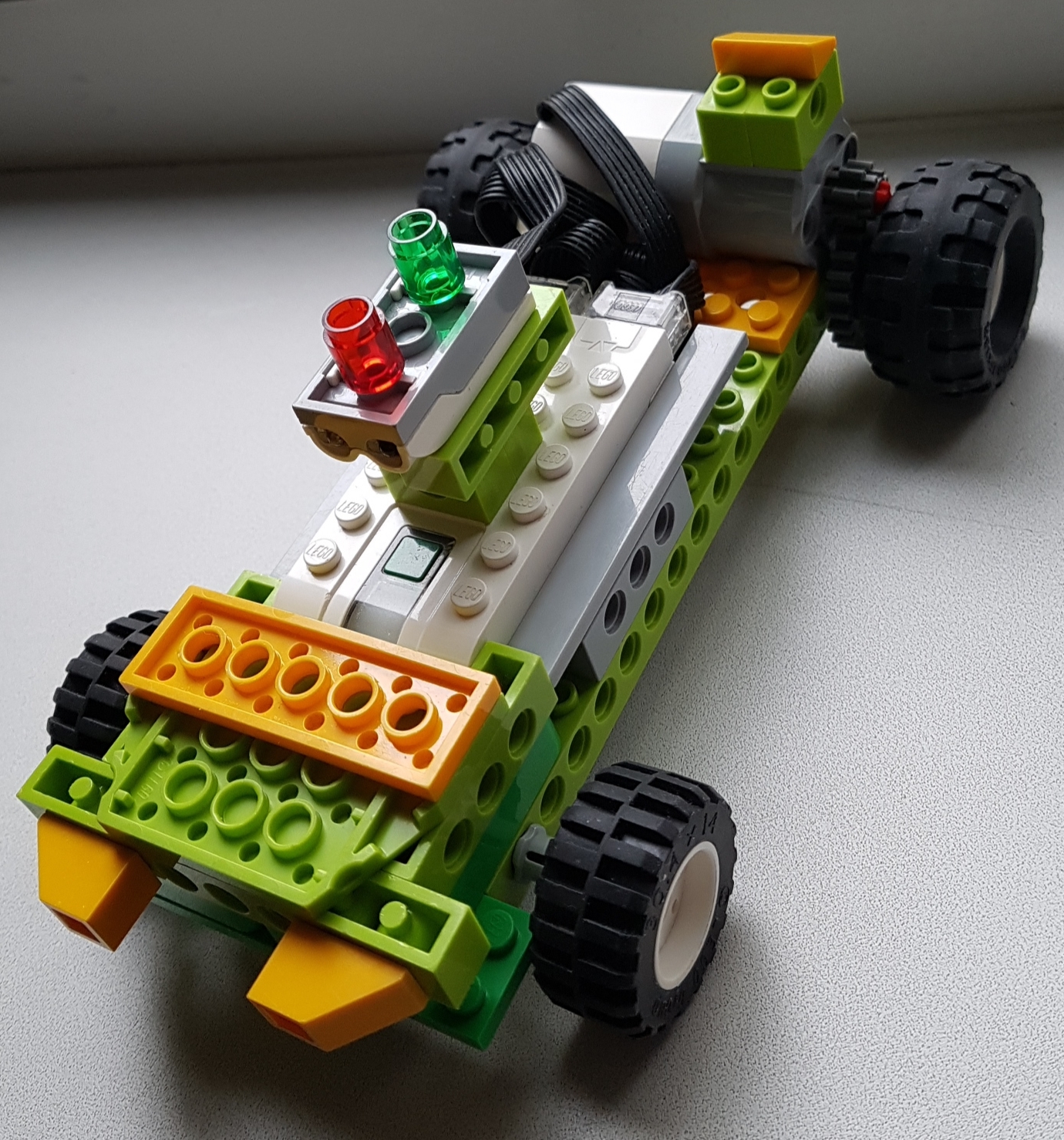 В этом простом проекте робомобиль пока будет двигаться вперед и при встрече с препятствием остановится. Затем отъедет назад и продолжит движение вперед. Задние колеса установлены на одной оси а значит оба являются ведущими. В состав проекта включен датчик расстояния.
В этом простом проекте робомобиль пока будет двигаться вперед и при встрече с препятствием остановится. Затем отъедет назад и продолжит движение вперед. Задние колеса установлены на одной оси а значит оба являются ведущими. В состав проекта включен датчик расстояния.

Зеленый кубик вызовет вращение двигателя в течение четырех секунд.
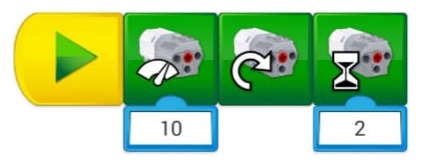
Первый кубик задает скорость вращения двигателя от 0 до 10. Второй направление вращения двигателя по часовой стрелке.

Первый кубик определяет цвет горения индикатора 5 – зеленый. Четвертый останавливает двигатель. Последний желтый задает паузу в четыре секунды.

Желтый кубик в виде дуги заставляет повторять цепочку команд внутри этой дуги три раза. Если число повторений не задано, то цикл будет повторяться бесконечно.
 Красный кубик воспроизводит звучек под номером один.
Красный кубик воспроизводит звучек под номером один.

Под пятым зеленым кубиком расположен оранжевый кубик на котором присутствует изображение датчика движения. Вращение двигателя прекратится как только на пути датчика движения окажется препятствие. Если простор для движения ограничен, то время движения назад необходимо уменьшить с пяти секунд, например, до двух секунд.
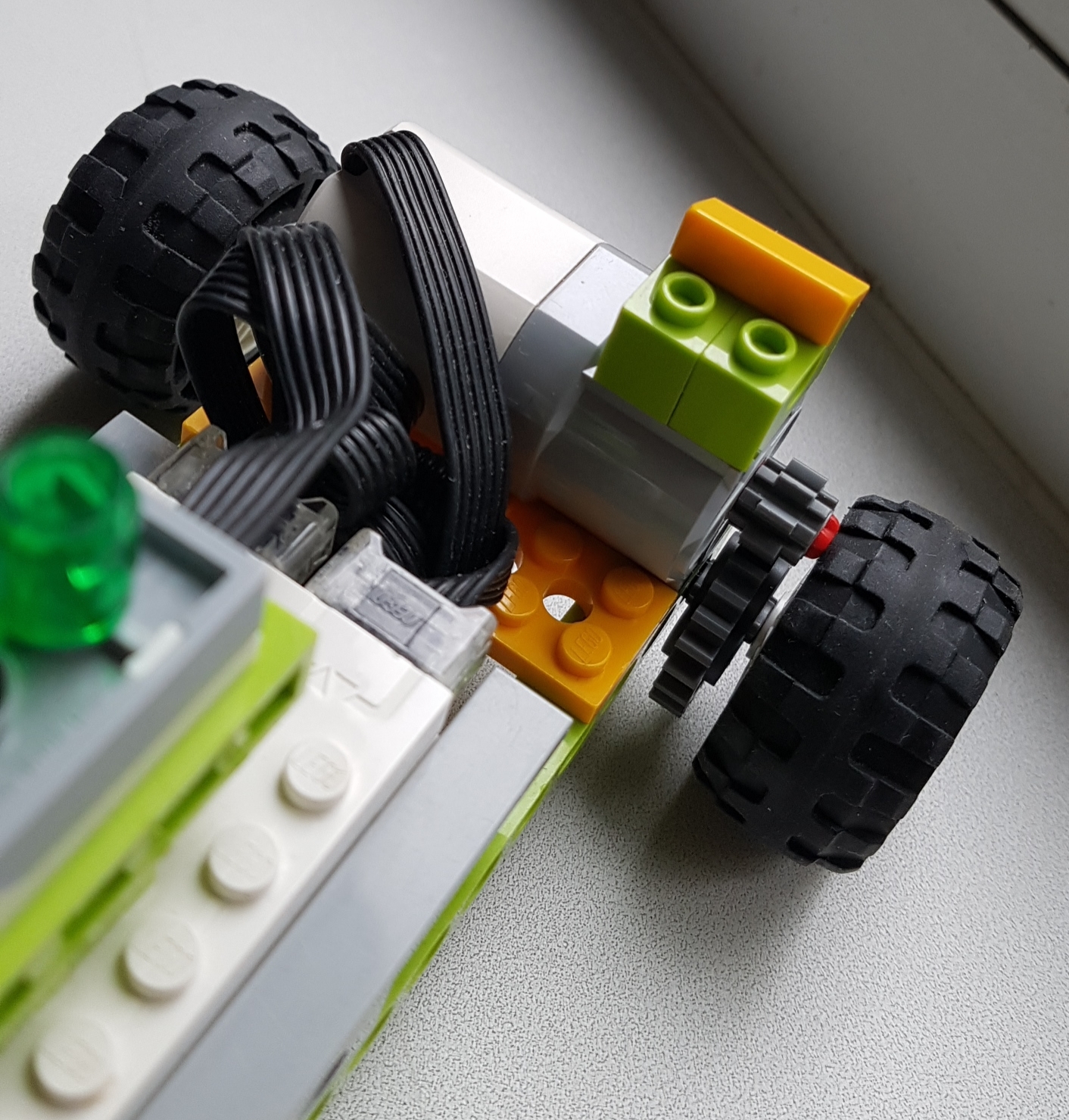
Для увеличения линейной скорости робомобиля надо увеличивать диаметр шестерни на валу электродвигателя. На этой картинке видим механическую передачу состоящую из двух шестерней.
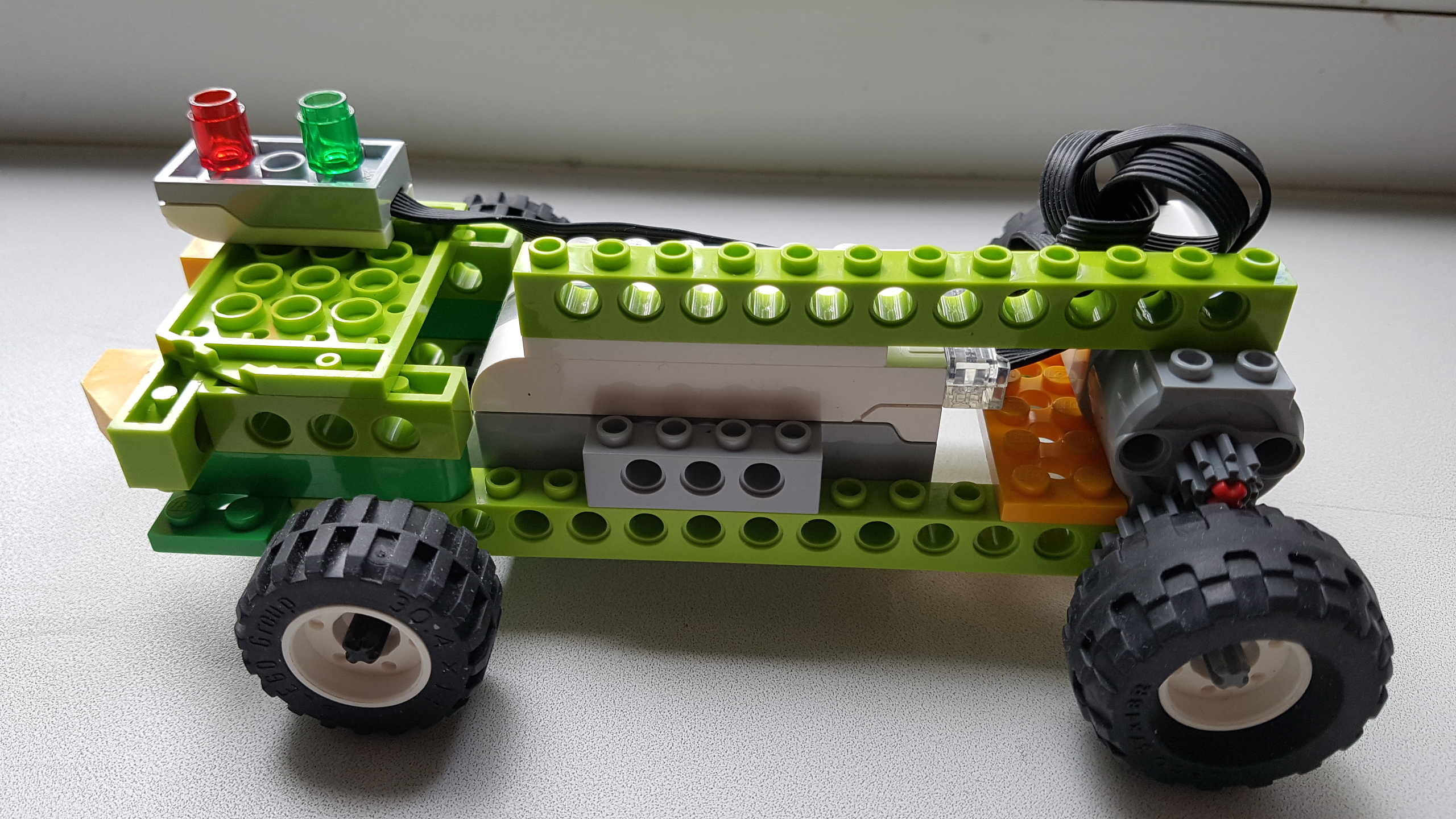 Верхняя салатная балка увеличивает жесткость всей конструкции.
Верхняя салатная балка увеличивает жесткость всей конструкции.
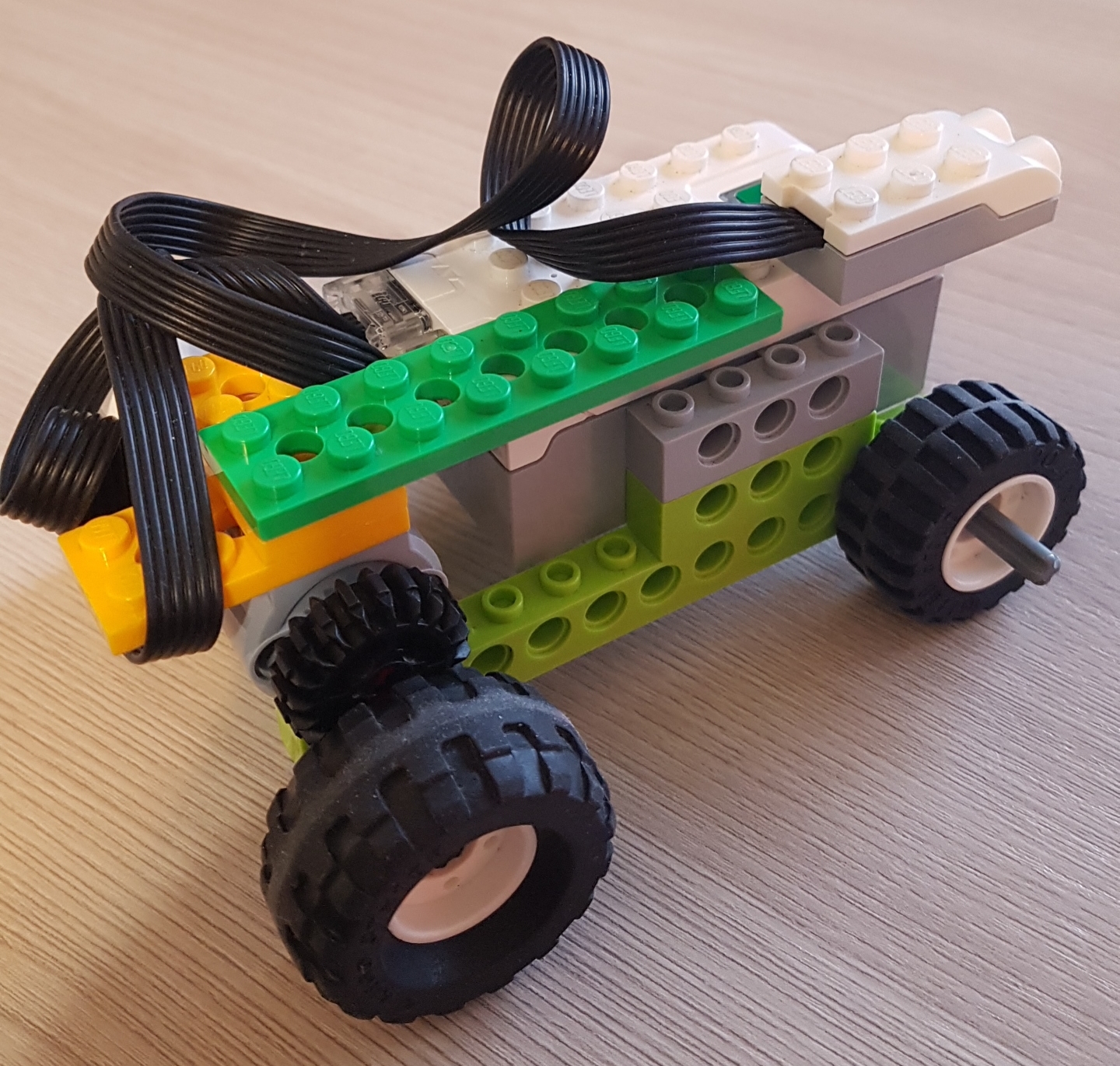 Другой более компактный вариант этого устройства.
Другой более компактный вариант этого устройства.
![]()
|
|
|
|