



|
|

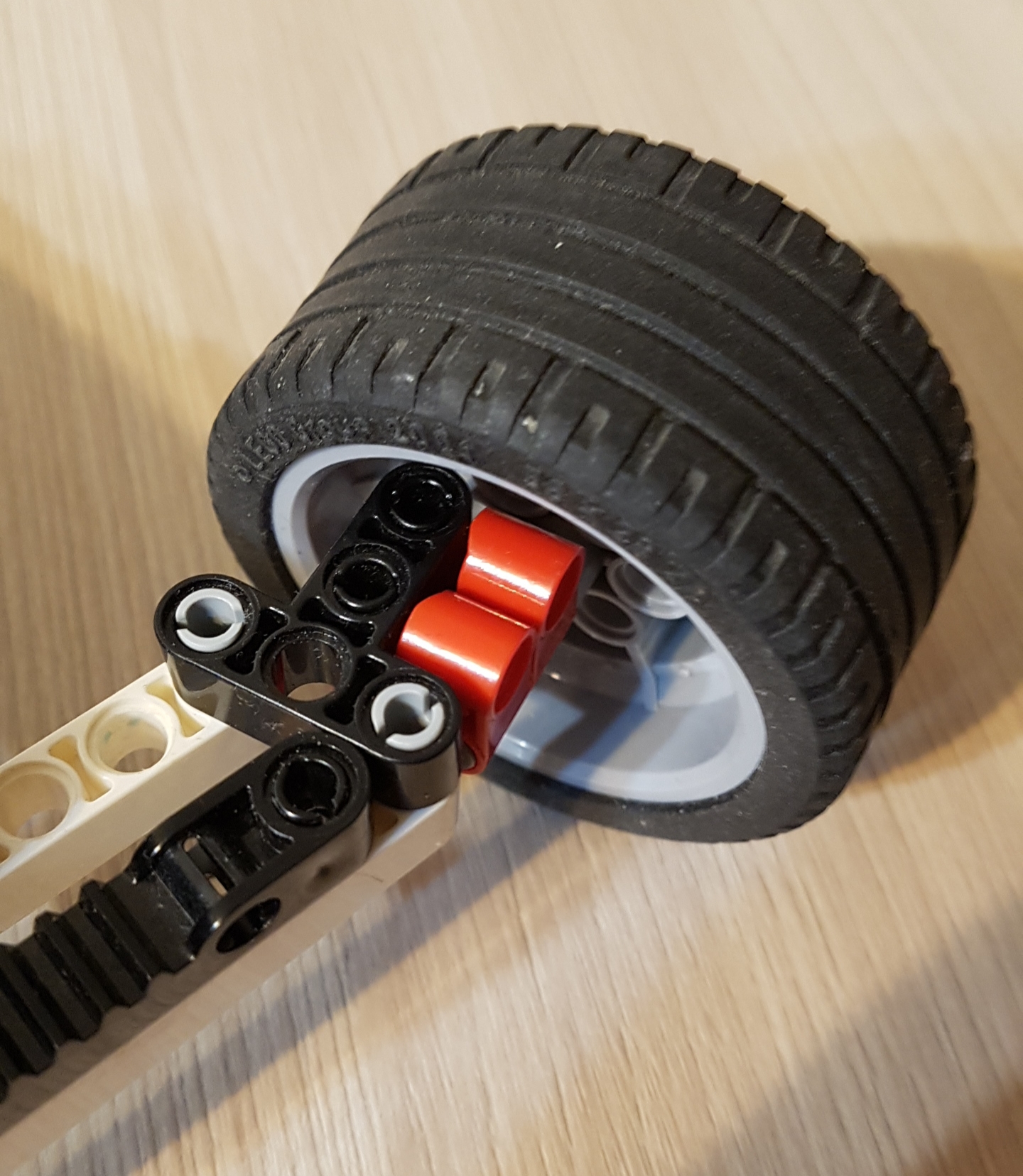
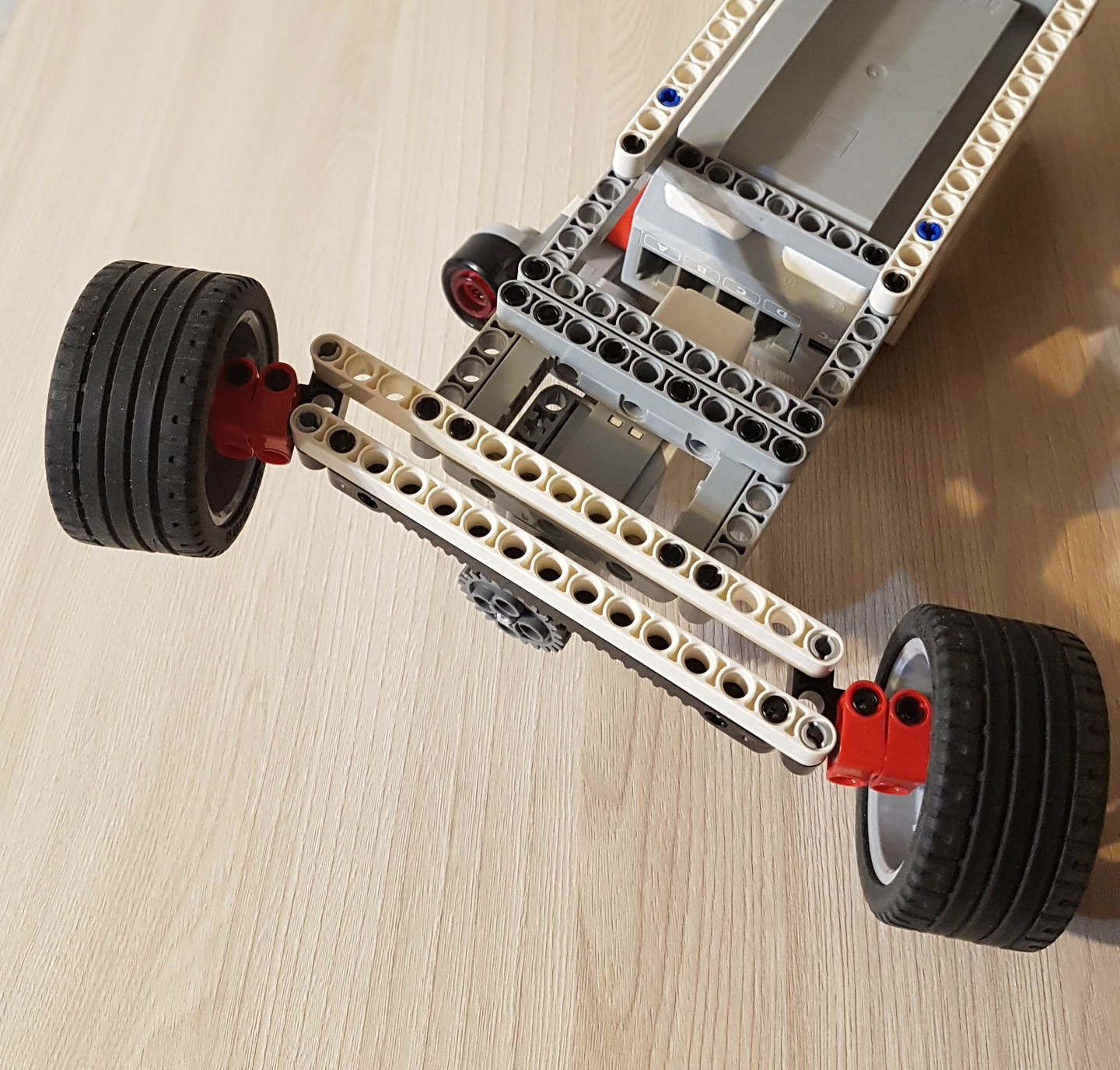
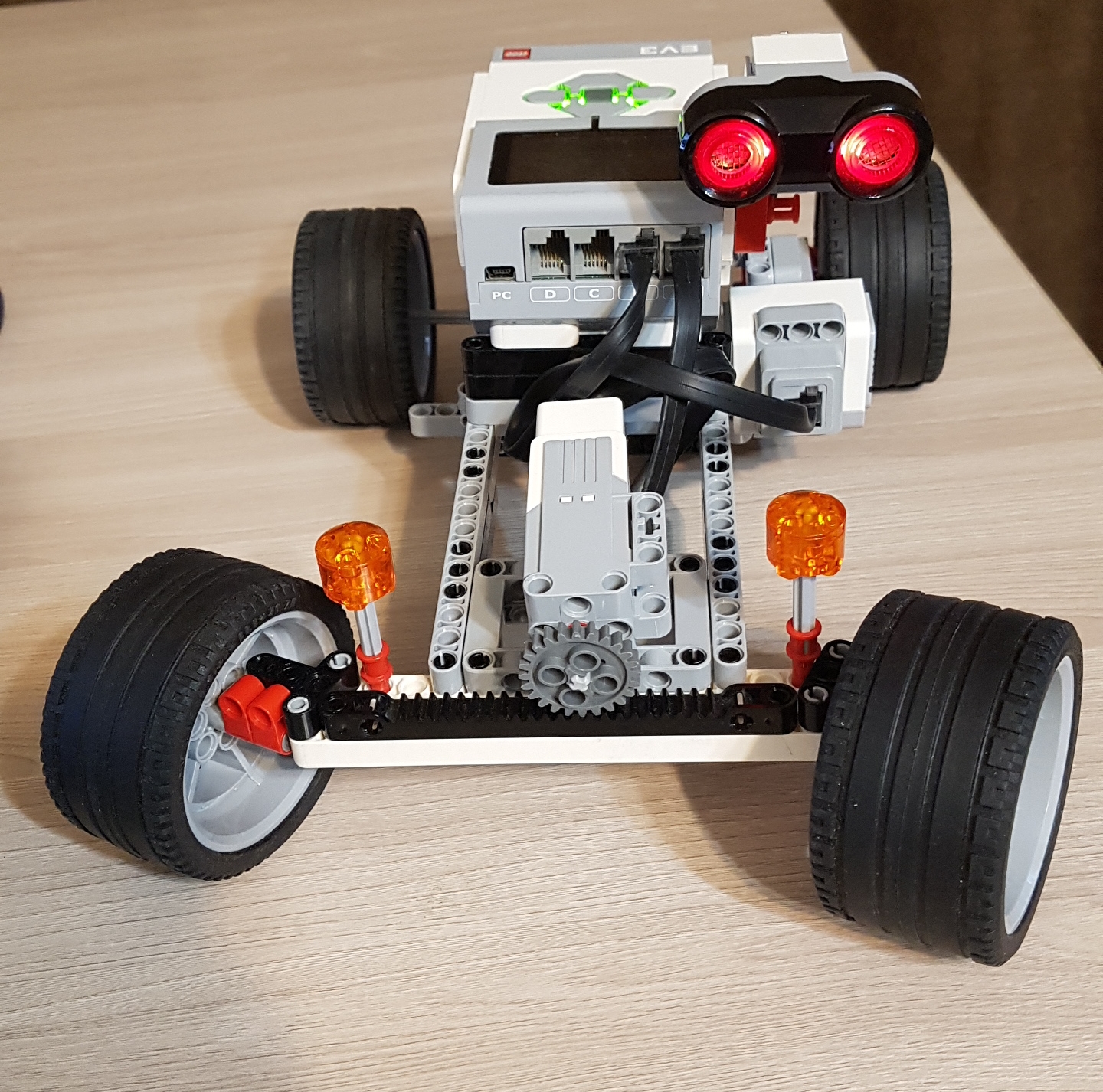
| Проект 5 Построим автомобиль с реальным рулевым механизмом. Приводить в действие этот механизм будет средний двигатель подключенный к порту A. Ведущим будет одно заднее колесо приводимое в движение большим двигателем подключенном к порту B. Второе заднее колесо может свободно вращаться и не будет затруднять движение при поворотах. Ультразвуковой датчик подключен к порту 4. По программе приведенной в конце страницы робомобиль будет двигаться в режиме автопилота. Как можно управлять робомобилем со смартфона или планшета расскажу позднее.
|

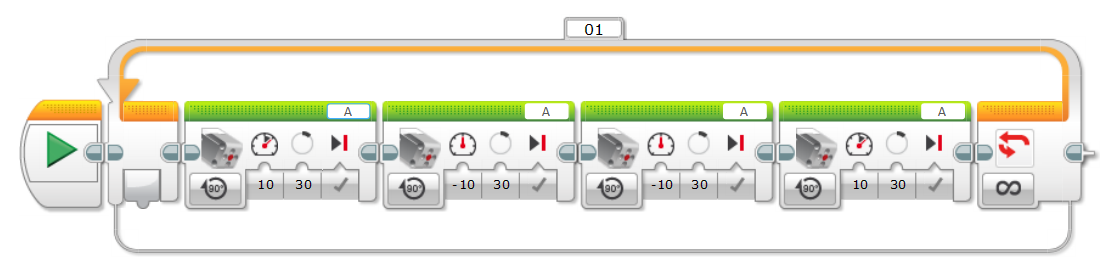
Программа для тестирования собранного рулевого механизма.
Программа для робомобиля с реальным рулевым механизмом в режиме автопилота.
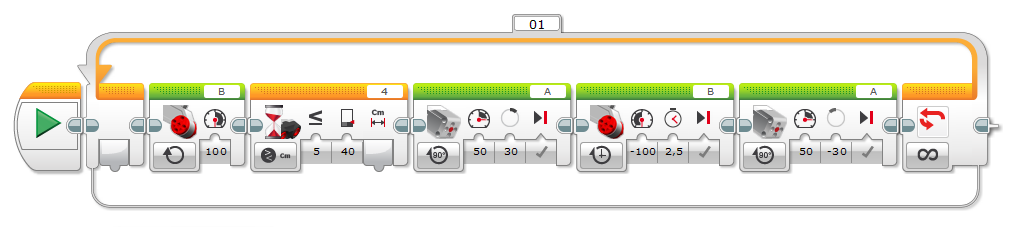
Внутри цикла пять блоков. Первый блок запускает большой мотор. Второй блок удерживает работу первого блока до тех пор пока ультразвуковой датчик не обнаружит препятствие на расстоянии меньшим или равным 40 см. И тогда управление передается третьему блоку. Третий блок поворачивает вал среднего двигателя на 30 градусов. Четвертый блок включает большой мотор в обратном направлении на 2,5 секунды. Это время надо будет подобрать опытным путем что бы разворота назад было достаточно. Пятый блок возвращает рулевой механизм в положение Прямо. Предлагаю тебе самостоятельно усложнить программу для того что бы траектория робомобиля стала более интересной. Можно, например, на каком-то этапе программы включить противоположный поворот даже при движении вперед. Минимальную программу опубликовал по причине трудности размещения длинной строки программы на странице сайта.
![]()
|
|
|
|